Articles
- Page Path
- HOME > Res Vestib Sci > Volume 21(4); 2022 > Article
-
Original Article
안진영상에서 안진기의 미끄러짐으로 유발된 동잡음 제거 알고리즘 개발 -
이예린1, 서영준2,3
 , 양세정1
, 양세정1 - Development of An Algorithm for Slippage-Induced Motion Artifacts Reduction in Video-Nystagmography
-
Yerin Lee1, Young Joon Seo2,3, Sejung Yang1
-
Research in Vestibular Science 2022;21(4):104-110.
DOI: https://doi.org/10.21790/rvs.2022.21.4.104
Published online: December 15, 2022
1Department of Biomedical Engineering, Yonsei University, Wonju, Korea
2Research Institute of Hearing Enhancement, Yonsei University Wonju College of Medicine, Wonju, Korea
3Department of Otorhinolaryngology, Yonsei University Wonju College of Medicine, Wonju, Korea
- Corresponding Author: Sejung Yang Department of Biomedical Engineering, Yonsei University, 1 Yonseidae-gil, Wonju 26493, Korea Tel: +82-33-760-2459 Fax: +82-33-760-2919 E-mail: syang@yonsei.ac.kr
- Corresponding Author: Sejung Yang Department of Biomedical Engineering, Yonsei University, 1 Yonseidae-gil, Wonju 26493, Korea Tel: +82-33-760-2459 Fax: +82-33-760-2919 E-mail: syang@yonsei.ac.kr
Copyright © 2022 by The Korean Balance Society.
This is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
- 1,511 Views
- 58 Download
Abstract
-
Objectives:
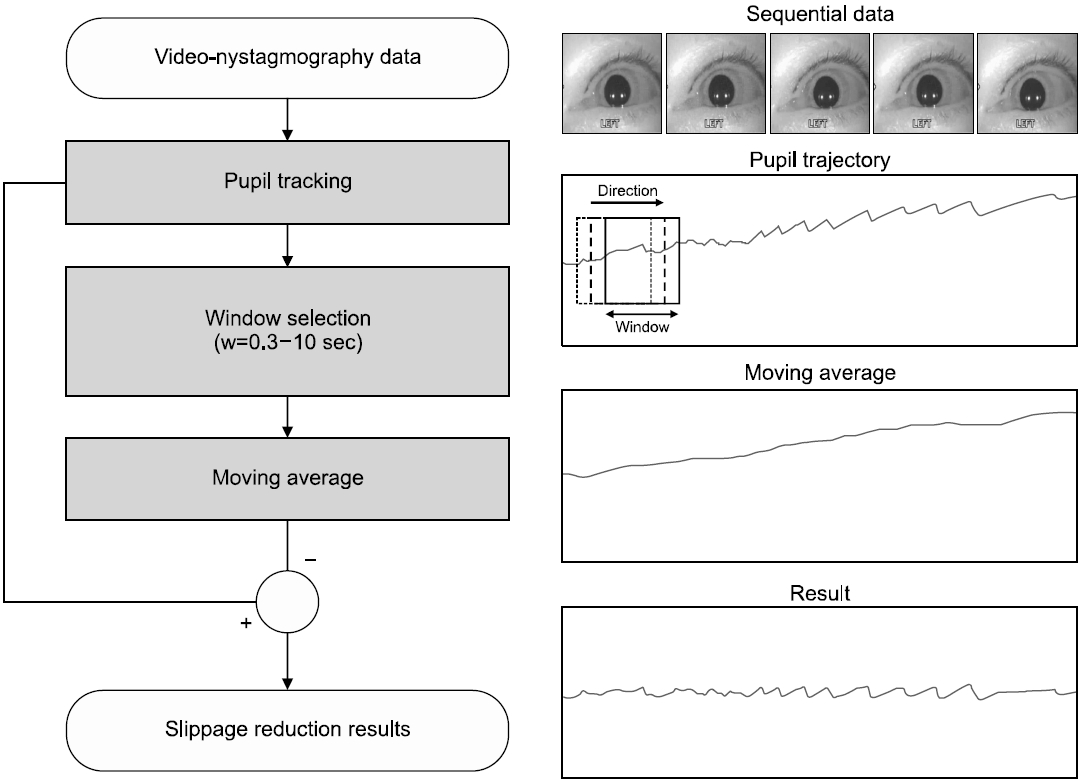
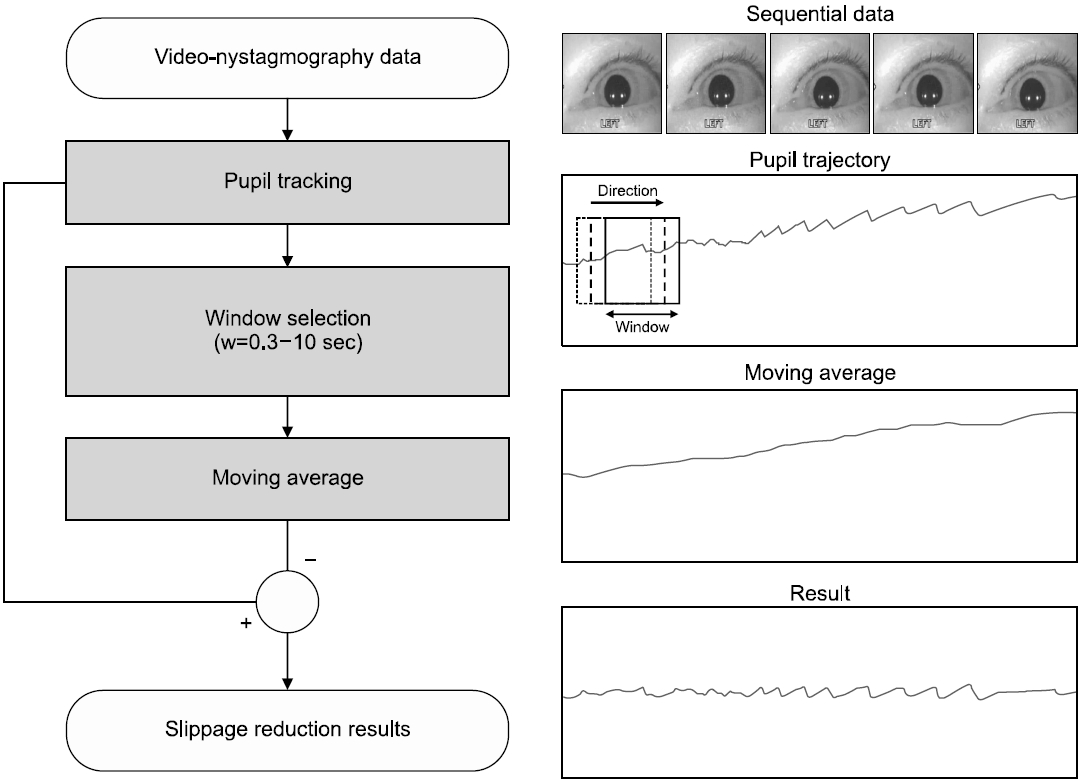
- The slippage of the video-nystagmography devices causes motion artifacts in the trajectory of the pupil and thus results in distortion in the nystagmus waveform. In this study, the moving average was proposed to reduce slippage-induced motion artifacts from the real-world data obtained in the field.
-
Methods:
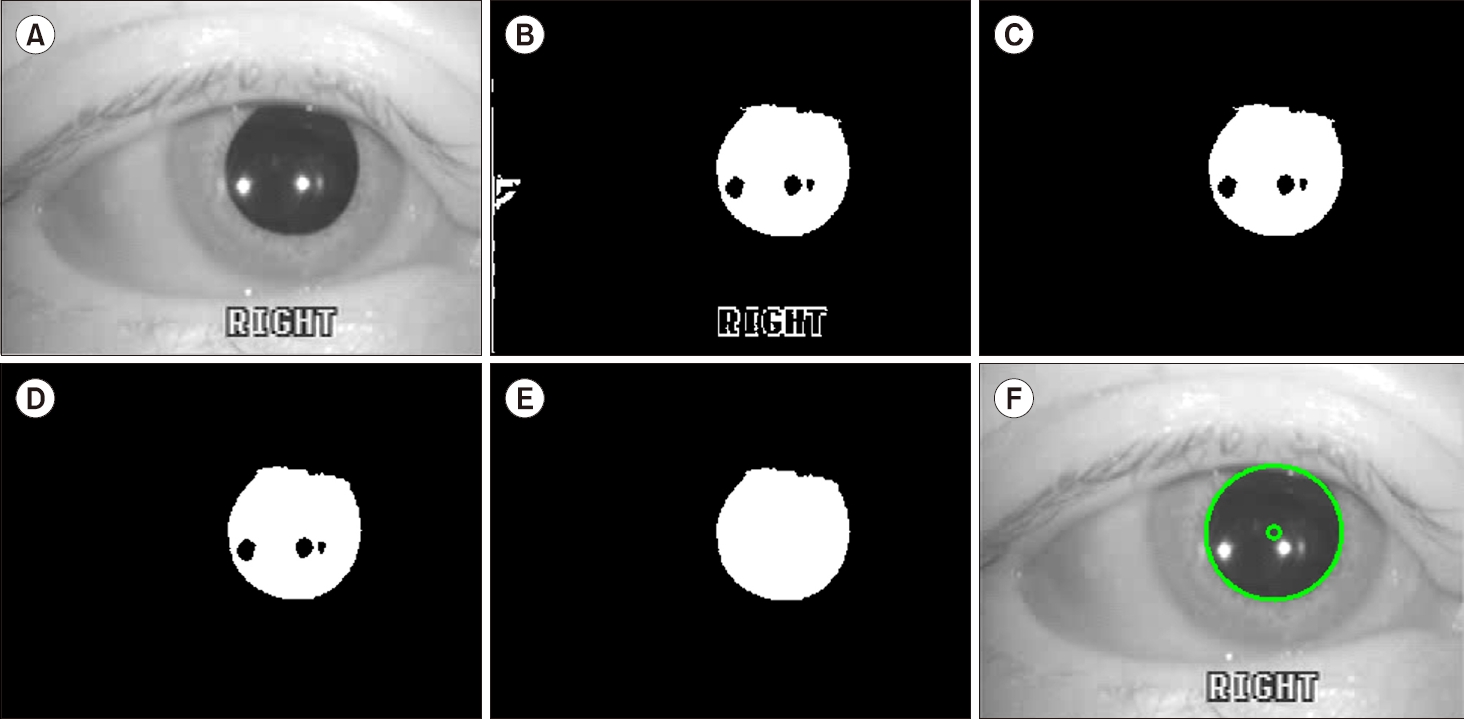
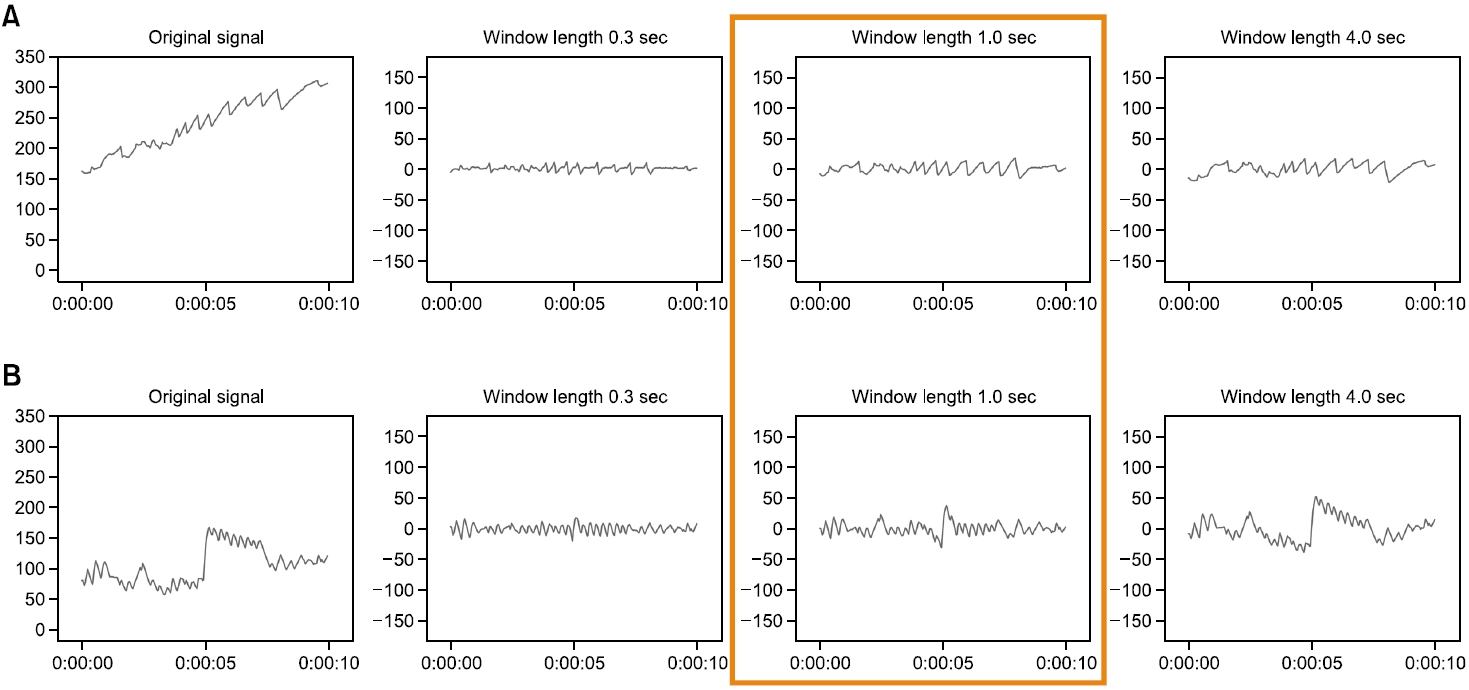
- The dataset consists of an infrared video of positional tests performed on eight patients with a lateral semicircular canal benign paroxysmal positional vertigo. The trajectories of the pupil were obtained from the video with binarization, morphological operation, and elliptical fitting algorithm. The acquired data was observed and the section where the slippage occurred was labeled by an otolaryngologist. The moving average with windows of various lengths was calculated and subtracted from the original signal and evaluated to find the most adequate parameter to reduce the motion artifact.
-
Results:
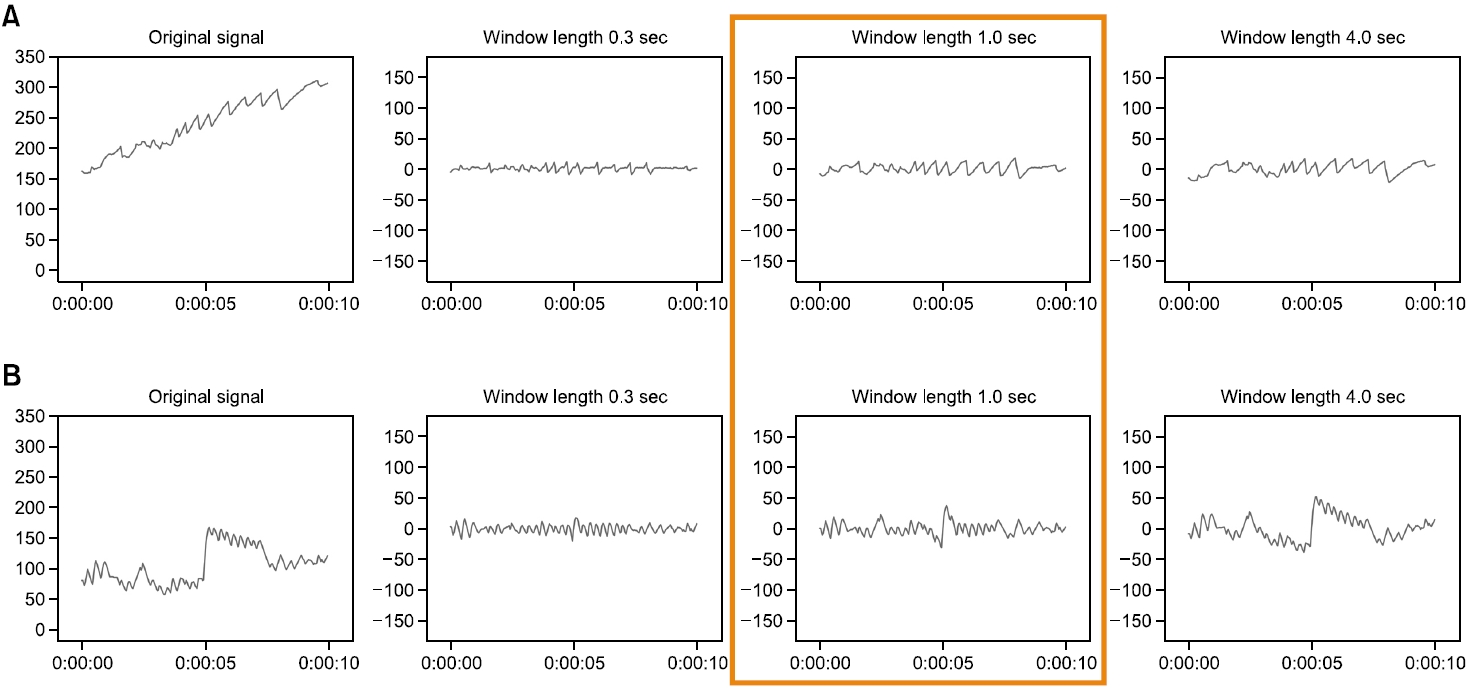
- The period of nystagmus in the given data was found to be ranged from 0.01 to 4 seconds. The slippages that appeared in the data can be categorized into fast and slow slippages. The length, distance, and speed of trajectories in the slippage ranges were also measured to find the characteristics of the motion artifact in video-nystagmography data. The shape of the nystagmus waveform was preserved, and the motion artifacts were reduced in both types of slippages when the length of the window in moving average was set to 1 second.
-
Conclusions:
- The algorithm developed in this study is expected to minimize errors caused by slippage when developing a diagnostic algorithm that can assist clinicians.
서 론
대상 및 방법
결 과
고 찰
결 론
-
이해관계(CONFLICT OF INTEREST)
저자들은 이 논문과 관련하여 이해관계의 충돌이 없음을 명시합니다.
-
연구 지원(FUNDING/SUPPORT)
이 연구는 보건복지부의 재원으로 범부처 재생의료기 술개발사업단의 범부처 재생의료기술 개발사업 지원(No. 21A0101L0)과 2022년도 교육부의 재원으로 한국연구재단 의 지원을 받아 수행된 지자체-대학 협력기반 지역혁신 사업(2022RIS-005)을 받아 수행되었습니다.
-
저자 기여(AUTHOR CONTRIBUTIONS)
CConceptualization, Investigation, Project administration: SY, YJS; Data curation: YJS, YL; Methodology, Formal analysis, Visualization: YL; Writing–original draft: YL; Writing–review & editing: all authors.
All authors read and approved the final manuscript.
ARTICLE INFORMATION
Values are presented as mean±standard deviation (range).
px, pixel.
The distance and velocity of the x-axis and the y-axis direction were calculated separately, and the total was obtained using the L2 norm. The average of distance and velocity was 1.5 times higher in the x-axis than the y-axis, and the maximum value of distance was 1.6 times higher in the x-axis than the y-axis and the maximum value of velocity was similar. Wilcoxon signed rank test to determine whether the sliding distance in the y-axis was smaller than in the x-axis had a p-value less than 0.05. The test to determine whether the sliding velocity in the y-axis was lower than in the x-axis had a p-value less than 0.1.
- 1. B hattacharyya N, Gubbels SP, Schw artz SR, Edlow JA, El-Kashlan H, Fife T, et al. Clinical practice guideline: benign paroxysmal positional vertigo (update) executive summary. Otolaryngol Head Neck Surg 2017;156:403–16.ArticlePubMedPDF
- 2. Hertle RW. Nystagmus in infancy and childhood: characteristics and evidence for treatment. Am Orthopt J 2010;60:48–58.ArticlePubMed
- 3. Ganança MM, Caovilla HH, Ganança FF. Electronystagmography versus videonystagmography. Braz J Otorhinolaryngol 2010;76:399–403.PubMed
- 4. A ydemir A, U neri A. Detection and analysis of quick phase eye movements in nystagmus (VNG). In: 2006 IEEE 14th Signal Processing and Communications Applications; 2006 Apr 17-19; Antalya, Turkey. IEEE. 2006.
- 5. Padmanabhan R, Meskin N, Khattab T, Shraim M, Al-Hitmi M. Reinforcement learning-based decision support system for COVID-19. Biomed Signal Process Control 2021;68:102676. ArticlePubMedPMC
- 6. Lim EC, Park JH, Jeon HJ, Kim HJ, Lee HJ, Song CG, et al. Developing a diagnostic decision support system for benign paroxysmal positional vertigo using a deep-learning model. J Clin Med 2019;8:633. ArticlePubMedPMC
- 7. Slama AB, Sahli H, Mouelhi A, Marrakchi J, Trabelsi H, Sayadi M. Machine learning based approach for vestibular disorder diagnostic in videonystagmography. Biomed Res 2019;30:571–8.Article
- 8. Reinhardt S, Schmidt J, Leuschel M, Schüle C, Schipper J. VertiGo: a pilot project in nystagmus detection via webcam. Curr Dir Biomed Eng 2020;6:20200043. Article
- 9. Gw on OH, Kong TH, Key J, Y ang S, Seo YJ. Auto-pattern recognition for diagnosis in benign paroxysmal positional vertigo using principal component analysis: a preliminary study. Res Vestib Sci 2022;21:6–18.ArticlePDF
- 10. Suh MW, Park JH, Kang SI, Lim JH, Park MK, Kw on SK. Effect of goggle slippage on the video head impulse test outcome and its mechanisms. Otol Neurotol 2017;38:102–9.Article
- 11. Macdougall HG, McGarvie LA, Halmagyi GM, Curthoys IS, Weber KP. The video Head Impulse Test (vHIT) detects vertical semicircular canal dysfunction. PLoS One 2013;8:e61488.ArticlePubMedPMC
- 12. Hayashi Y, Kanzaki J, Etoh N, Higashino K, Goto F, Schneider E, et al. Three-dimensional analysis of nystagmus in benign paroxysmal positional vertigo: new insights into its pathophysiology. J Neurol 2002;249:1683–8.PubMed
- 13. Seo YJ, Park YA, Kong TH, Bae MR, Kim SH. Head position and increased head velocity to optimize video head impulse test sensitivity. Eur Arch Otorhinolaryngol 2016;273:3595–602.ArticlePubMedPDF
- 14. Roh KJ, Kim JY, Son EJ. Comparison of suppression head impulse and conventional head impulse test protocols. Res Vestib Sci 2019;18:91–7.ArticlePDF
- 15. Chang TP, Zee DS, Kheradmand A. Technological advances in testing the dizzy patient: the bedside examination is still the key to successful diagnosis. In: Gleason AT, Kesser BW editors. Dizziness and vertigo across the lifespan. St. Louis: Elsevier Inc.; 2019. p.9–30.
- 16. Fitzgibbon AW, Fisher RB. A buyer’s guide to conic fitting. In: Proceedings of the British Machine Vision Conference; 1995 Sep 11-14; Birmingham, UK. London, BMVC Press. 1995;513–22.Article
- 17. Büki B, Simon L, Garab S, Lundberg YW, Jünger H, Straumann D. Sitting-up vertigo and trunk retropulsion in patients with benign positional vertigo but without positional nystagmus. J Neurol Neurosurg Psychiatry 2011;82:98–104.ArticlePubMed
- 18. D e Stefano A, Kulamarva G, Citraro L, N eri G, Croce A. Spontaneous nystagmus in benign paroxysmal positional vertigo. Am J Otolaryngol 2011;32:185–9.ArticlePubMed
- 19. White JA, Coale KD, Catalano PJ, Oas JG. Diagnosis and management of lateral semicircular canal benign paroxysmal positional vertigo. Otolaryngol Head Neck Surg 2005;133:278–84.ArticlePubMedPDF
 PubReader
PubReader ePub Link
ePub Link Cite
Cite